




Project Case Study
Chameleon Inspired Hybrid Quadrupedal Robot Locomotion
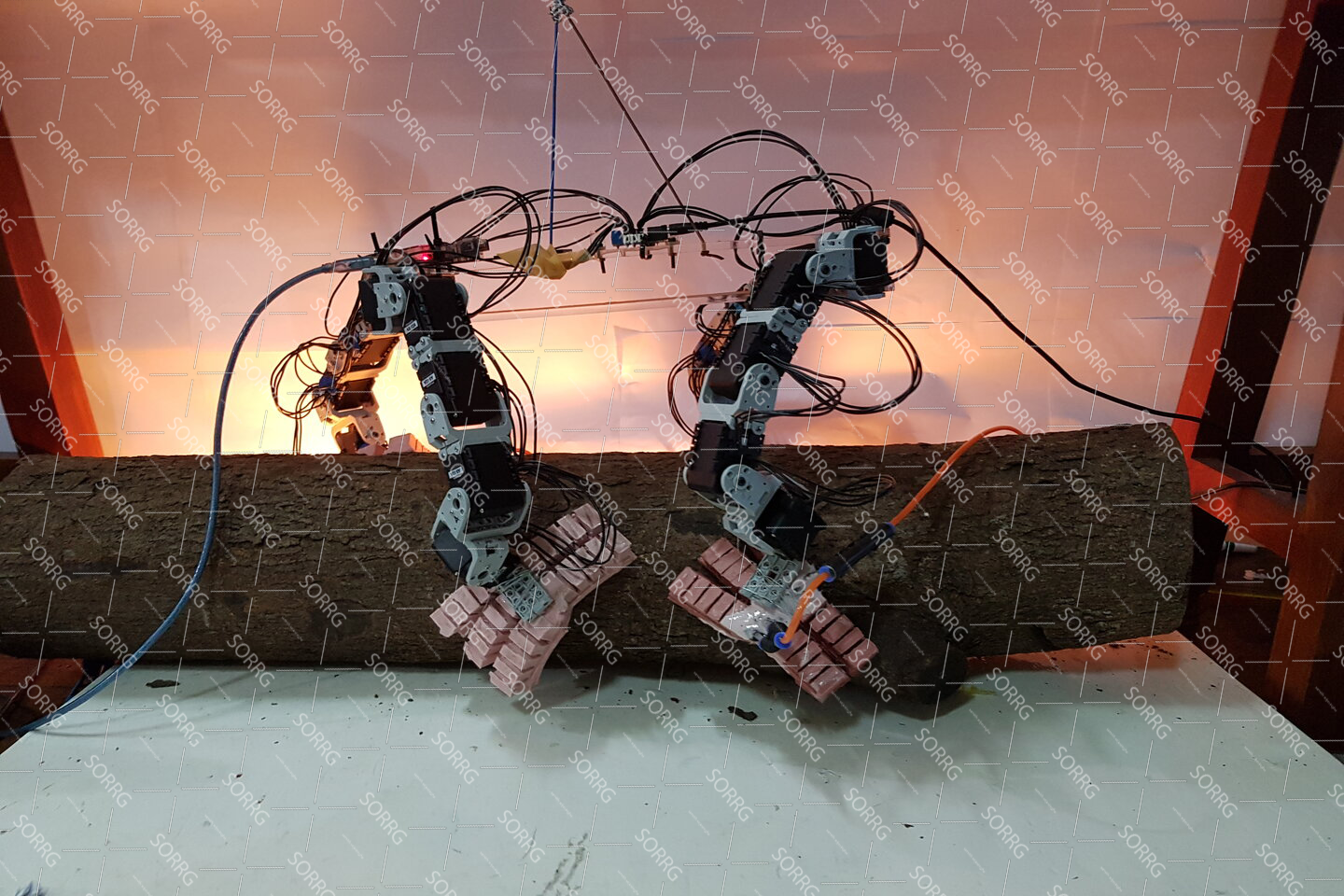
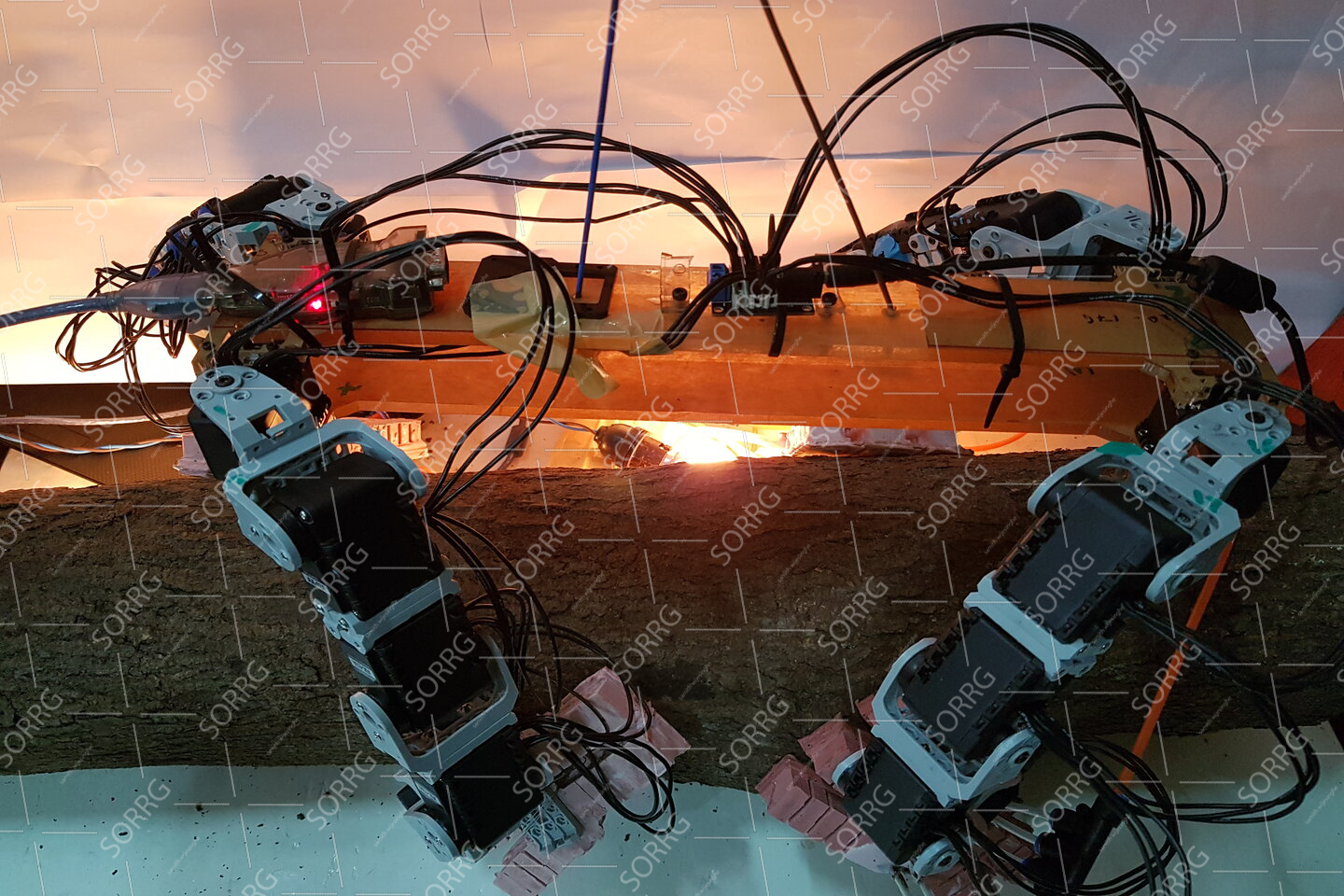
The adaptation in climbing and walking of aborals is unique, especially for chameleons. Chameleon is a type of lizard that is small with strong grasping abilities and possesses a prehensile tail and their toes are fused into two opposable units which gives them superior abilities for locomotion on complex terrains and grasping capability to hold its body against falling. In this work we have designed a robot chameleon (a scale up version) which is capable of mimicking the gait pattern of the Chameleon. A four legged robotic Chameleon was designed to represent for quadrupedal animal by a designed kinematics attached to an elastomer based feet with five toes. Each leg is a hybrid element which contains a servo controlled kinematic link (with five degree of freedom) with a pneumatic controlled soft feet at the end. Electro mechanical part is responsible for clearance and moving forward while pneumatic part is used to grasp the surface. Therefore this research claims the novelty of presenting a hybrid soft-robot with a greater flexibility which helps to survive in complex terrains and locations such as tree branches while focusing on its main mission.
- Technologies : Soft Robotics, Matlab, Pneumatic, Control systems & Solid Works
- Members : Samith Wijesinghe, Thisara Pathirana, Waruna Karunarathne
- Year : March , 2019
- Associated with : Soft Robotics Research Group of The Open University of Sri Lanka


Font by flaticon.com Under CC: Eucalyp